ժҪ:�S���_����Ⱥ��_���y�ȵ����ӣ��Լ������������IJ���Ҫ��܉���b������ú�V�o���\ݔ����Ҫ�a�䣬�l�]��������������á������������͙C��܉�������ԣ��OӋ��һ�����͆η��m�׃�����O�y�c�����b�ã�ԓ�b�ò���CAN��������O��֮�g�Ľ���������Ч�p�پ�����ͨ�^�����ֱ����_�P���ɿ��ƊA�o���Ƅӡ�˦������������Q�ѵ����P���Є����������F�������͙C�Ԅӱ��o�������b�É�����������܇�����Ƚyһ�O�ء�ԓ�b��Ŀǰ����ɾ��¹��I��ԇ�������ָ���_�����OӋҪ��
0 ����
ú�Vʹ�õĸ�Ч�o���\ݔ�O����Ҫ�Пo܉�z݆܇����܉������܉܇���X܉܇����܉���C܇���Ԍ��F��܇����������ֱ�_�\ݔ������Y���o�����C���`��D���돽С�������ͬ�r���I�����c��1�ݣ��ɞ龮�¸�Ч�o���\ݔ�Cе�O�䡣��܉���b�ó������������ϲ����g�����ڈ����ճ��ˆT�����ϵ��\�ͣ��Լ�Һ��֧�ܵ����w���\�΄ա�
����������ͬ����܉���C܇���ж�N��ʽ������:��늳؆�܉�����L�ӆ�܉�����������͙C��܉����2�ݡ�����늳��������U��늳���ú�V����ʹ������ԭ������늳���������Ć�܉���C܇��Խ��Խ��;�L�ӆ�܉���ṩ�Ą����^С����Y����ʽ���Ρ��w�eС����Ҫ���ڿ��gխС�\ݔҪ��͵Ĉ���;�������͙C��܉�����Р��������������������`���ȫ����Ч�����c��3�ݣ��䑪�Õ�Խ��Խ�V����
ᘌ��������͙C��܉�������c�������OӋ��һ�����͆η��m�׃�����O�y�c�����b�á�ԓ�b�ÿɌ��r�O�y�@ʾ���͙C�Ԅӱ��o������ϵ�y��������( �ƄӉ������A�o�������a�͉��������Ӊ�������������) �������͜ضȡ�Һ���͜ضȡ���܇�A�ǵȡ� 1 �b�ù���ԭ��ԓ�������͙C���͆η��m�׃�����O�y�c�����b�õĹ���ԭ����D 1 ��ʾ���b�ð�����̖�ɼ�ģ�K���Դ�^����䡢�ֱ��_�P���@ʾ�O���Լ����N����Ԫ����������Ԫ���⣬���M��ģ�K���� CAN �����M�Д���������3�ݡ�
1 �b�ù���ԭ��
ԓ�������͙C���͆η��m�׃�����O�y�c�����b�õĹ�
 KEK����׃����_�׃����_Һλ׃����_�ض�׃����
KEK����׃����_�׃����_Һλ׃����_�ض�׃����
1) �Դ�^������������b�õěQ�ߺͿ������ģ����Ձ�����̖�ɼ�ģ�K���ֱ��_�P�Ĕ�����������̖�ɼ�ģ�K���ֱ��_�P��ָ̖ʾؓ؟���Ќ�����늴��y���ơ�������̖�l����Һ��늴��y���Ќ����Ą�����������Һ����·�ĉ������l��׃������̖�ɼ�ģ�K����ĉ����������ɼ���·���������������o�Դ�^����䣬�Դ�^����䌢���յ��ĉ��������Ͱl���Ŀ��������M�Ќ��ȣ������O��������߉�Д�o���������߈���Ϣ���Ժ��� ID ���a�l�����@ʾ�O�䣬���@ʾ�O��ؓ؟�����@ʾ���߈���ʾ�����FҺ����·���]�h���ƣ�4�ݡ�ͬ�r���Դ�^�����߀ؓ؟�o�@ʾ�O�䡢�ֱ��_�P����̖�ɼ�ģ�K�Լ�ҕ�l�O���O���ṩ�����Դ��
2)��̖�ɼ�ģ�Kؓ؟�������͙C�Ԅӱ��o������ϵ�y�������P�����O�y�Ͳɼ���ͬ�r���O�y���������Ժ���ID���aͨ�^CAN�����l�����Դ�^����䡣���Ԅӱ��o�������ޕr����̖�ɼ�ģ�K�l��Ϩ���������o�Դ�^����䣬���Դ�^���������ⲿ�����O�䌍�Fͣ�CϨ��
3)�@ʾ�O��ͼt��z���^ؓ؟ҕ�l�O���Լ���܉�����r�������@ʾ���ɂ�ҕ�l�@ʾ�O�䰲�b���{��ҵ����棬�t��z���^ؓ؟�OҕijЩҕ�������Σ�U�ą^��
4)�{�T�����ֱ��_�P�Á����Ɔ�܉���C܇�����F��ͣ���Q�ѡ�����(耳ײ���)��˦�Ƅӡ�ǰ�M�����˵Ȅ�����
2 Ӳ���OӋ
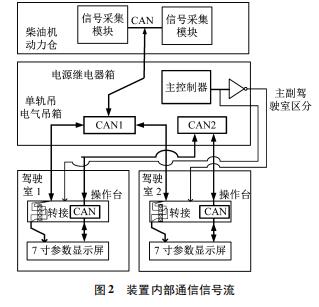
����MT/T989—2006���V�÷������͙C�o܉�z݆܇ͨ�ü��g�l�����Լ�MT/T883—2000���V�ò��͙C��܉���C܇���ИI�˜ʵ�Ҫ���茦�b���з������͙C�Ԅӱ��o�������C܇ϵ�y��������(�ƄӉ������A�o�������a�͉��������Ӊ�������������)�������͜ضȡ�Һ���͜ضȡ���܇�A�ǽǶȵ��M�бO�y��4-5�ݡ�
2��1��̖�ɼ�ģ�K
��̖�ɼ�ģ�K�ɼ�3·�K���ض���̖��1·�_�P���͉���1·�_�P��ˮλ��̖��1·����׃����SMbus��̖��������ǰ�������r�@ʾ������6�ݡ����O�y������(��l�әCˮ���^��)���߹���(�����׃�����ྀ)�r����̖�ɼ�ģ�K�����ɼ���̖�M���Д࣬�M�����
��̖�ɼ�ģ�K�߂�ǰ��oԴ���c�_�P��늴��y���ƹ��ܣ�����̖�ɼ�ģ�K����߉�Д���Ҫͣ܇Ϩ��r���o������������̖�����xݔ�������Ʒǰ��oԴ���c�_�]��늴��y��·�Q���Ԍ��Fͣ܇Ϩ��
2��2�ֱ������_
�V�ñ����Ͳ����_���ڌ��F�������͙C��܉���C܇��܇����
�η��m�׃�����O��Ŀ��ƹ��ܡ��������܌��F1·�����Դݔ�롢8·�����_�P����̖ݔ�롢1·����ģ�M��̖ݔ�롢4·�����_�P��ݔ����1·����CANͨ�š�10·�������ӽӾ���
2��3�Դ�^�����
�Դ�^������F12·�ǰ���Դ�_�P��ݔ����2·�ǰ������}�_�����{����̖ݔ����4·�����Դݔ����2·�����_�P��ݔ����2·�������xCANͨ�š����У�12·�ǰ���Դ�_�P��ݔ����Ҫ���ƌ����:2·ͣ�C늴��y��2·�Ƅ�늴��y��1·���늴��y��2·˦�늴��y��2·������������2·�������ȡ�1·�A����2·�ǰ������}�_�����{����̖ݔ����Ҫ����ǰ�M�ͺ��˱���늴��y��4·���|��ȫ���Դݔ����Ҫ�o�ֱ������_�����|��ȫ�ͅ����@ʾ�������|��ȫ��ҕ�l�@ʾ�������|��ȫ�͔z���^����̖�ɼ��O��ȹ�늡�2·���|��ȫ���_�P��ݔ����ֱ������_�ļ�ͣ�_�Pݔ�룬���ڼ�ͣ��܉���C܇��2·���|��ȫ���xCANͨ��������̖�ɼ��O�䡢���|��ȫ�ͅ����@ʾ���c������֮�g��ͨ�š�
3 ܛ���OӋ
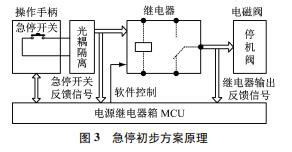
�b�ÃȲ�ͨ����̖����D2��ʾ����̖�ɼ�ģ�K�ɼ������������̖��������˿ڲɼ��Ă�������̖�Ժ�����ַ���a�fͬ��������ʽ�l����CAN1��������̖�ɼ�ģ�K��������Ϣ�Ʌ����@ʾ���°l���Դ�^�������Ձ�����̖�ɼ�ģ�K���ֱ������_������ͬ�r�������ưl��ָ��ͷ�����Ϣ�o�����нY���������ưl��ָ��ͷ���������һ�r�����o������̖��CAN2�������ֱ������_�����������Ƅ����l��������̖��CAN2�����������@ʾ������CAN1��CAN2�����������M�Д����@ʾ�͈���ʾ�ȡ�
4 ��܉����ͣ�����OӋ
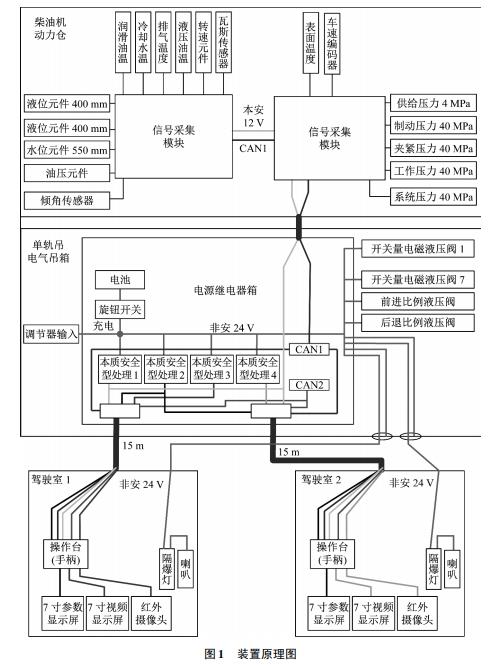
��܉���ļ�ͣ�漰�\�еİ�ȫ���OӋ�в����������ԭ����D 3 ��ʾ�� 1) ͨ �ż�ͣ��ʽ��ͨ�^�ֱ�������ɼ�“��ͣ”�_�P��̖��ͨ�^ CAN �����l�����Դ�^����䣬���Դ�^�����ؓ؟ 2 ��ͣ�C�yϨ��ͣ�C�� 2) Ӳ����ͣ��ʽ����“��ͣ”�_�P��ֱ̖�������Դ�^����䣬���� 2 ��ͣ�C�yϨ��ͣ�C��
5 늳�����Ӌ��
��܉������ǰ��Ҫ�O�y������������B�Լ���ǰ�h����˹��ȣ�����헅��������ҷ��φ��Ӳ��͙C�l��������S�����O�䣬����OӋ�еV�ø����汾�|��ȫ���Դ�^����������ú��늳ء�늳�������������:
1)��̖�ɼ�ģ�K:500mA/12V;
2)�ֱ�������:300mA/12V×2=600mA/12V;
3)7�煢���@ʾ��:550mA/12V×2=1100mA/12V;
4)�Դ�^�����:500mA/24V��
���������DC24V�r����������ԴЧ�ʰ���70%���㣬��DC24V�r����s��2A�������պ���Դ�����Դ�����r���܉���2hӋ�㣬����Դ�x�ò�С��C24V/4Ah��
6 �YՓ
���b�ø����O��ͨ�ŷ�ʽ��������ˇ�M��Ҏ�����O�y�O�䡢�@ʾ�O�䡢�����ֱ����_�P�������_�P�O��֮�g��ͨ�Ų���CAN������5�ݣ��P�I���в�����“��ͣ”��κþ��|���ƣ��x�Ͷ�о��|�B���{��Һ͙C܇�^����䣬������F������|������һ�𡣽Y���ϣ��Դ�^�������õ��b�����ڰ��bλ��������Ӿ��_�|�OӋ���p���˙C܇�������^���Юa������ӌ��Դ�^������Ӱ푡�
ԓ�b��Ŀǰ����˹��I��ԇ�������ָ���_�����OӋҪ�����茦ܛ�����������ڹ���ģʽ�µă���̎�������������M�Ѓ�����
ע���������x�����¾���ԭ�����D�dՈ�������ĵ�ַ