���r�g��2018-06-11 ��Դ�� �����p���I�WԺ늚���Ϣ���̌WԺ������ʡ��Ϣ��������c����� ���ߣ��� �� ��
ժ��Ҫ�������������sҺλӋ������Ⱥͷ����ԣ������s����ҺλӋ�y���ʴ_�Եĸɔ_��������С�ڣ������ʹ�����sҺλӋ���о������OӋ�˶��A��Դ��ͨ�x�l�Ŵ��·�������ãͣ���������ܛ���M�з��������Փ�C��ԓ�{����������ʹ�����sҺλӋ�Б���̖����ȺͿ��ɔ_�ԵĿ����ԡ�QDl����׃����_�׃����_Һλ׃����_�ض�׃����
����
�S���F����Ӽ��g���w�ٰlչ���Ԅӻ��̶�Խ��Խ�ߣ�ʹ��
������sҺλ���������\������ԓ��͂��������g�·f�����^�������������p�����˹����c�������S�C�`��V�������ڷǽ��|���߾��ȡ��F���h�����ӵĈ��ϣۣ������ݡ��Б���̖�Ǵ�����sҺλ���������F��λ��que�y���ĸ�����ͨ��������sҺλ�����������F���h�����s��늴Ÿɔ_���^��ԓ���ڲ����z�Ϸ��䣬�����Q����ʰȡ������λ�C�ϱ��F��y������ʧ�����׃��Ŀǰ��ᘌ�ԓ��r�Ľ�Q�����Dz����N���O������V���ɔ_�s����Ȼ�����ڸБ���̖�|���ͷ����Եă����ȷ����Пo̽��������������С�ڣ����ʹ�����sҺλ�������Б���̖���о������OӋ�˶��A��Դ��ͨ�x�l�Ŵ��·��
��������sҺλ������ԭ��
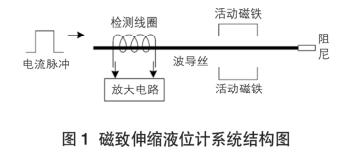
������sҺλ�������ɽ�����ӂ}���ƣ壭�Σ�Ͻ��z��̽�y�U��˥�p����ȽM�ɣ���D����ʾ����Һλ�����������r�����}�_�l���·�a��һ�������ԵĴ����խ�}�_���d�������z�ϡ�����ζ��ɿ�֪�������}�_�������£��܇����g���a��һ����ֱ�ڲ����z�ĭh��ň����h��ň��c��Ӵ��F�a�����S��ň������r����B�Ӯa�������δň�������κ����Ч���ۣ������ݣ�ԓ�����δň�ʹ�����z�ڻ�������w̎�l��Ť�D��׃���γɏ��ԙCе���ز����z��ɶ˂��������_Һλ�������ײ��ď��ԙCе����˥�p�������գ����_픶˵ď��ԙCе�������Q����ʰȡ���ɾS����Ч���ۣ��������ݿ�֪�������z��׃��������s���ϵĴŌ��ʰl����׃������������늴ŸБ����ɣ����Q������ʰȡ׃���Ĵň��a����늉���̖�Ķ����F�y����λ��Ŀ�ġ�
��������sҺλ�������Б���̖����
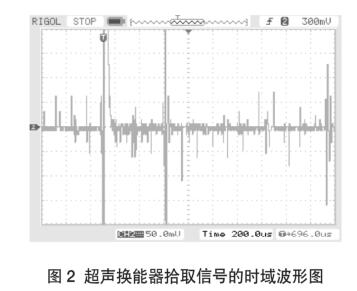
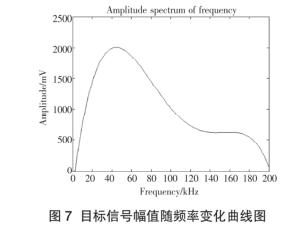
���IJ��ãԣ�����������˾���a����̖��ԣãӡ����������õ�ʾ�������䎧���飲�����ͣȣ����ɘ��ʸ��_���ǣӣ��ɘ��l�ʞ飱�����ͣȣ����ɘ��c���飱�������������^�쳬�Q����ʰȡ��̖���Ŵ��ĕr���Σ���D����ʾ�����l�F�Б���̖���s���ɔ_��̖������������֪�Б���̖�ǻ��l��̖��Ŀ����̖��Ҫ�����ڣ�������ȣ����£�������ȣ������_����ֵ��ͬ�r߀��һЩ���l�ɔ_�ijɷ֣���ʾ�����ϱ��F��r�����ϵ�ë�̡��@Щ�����Б���̖�Ĕ�������Ӱ��^����Ӱ���Һλ�������y���Ĝʴ_�Ⱥͷ����ԡ�
3�����A��Դ��ͨ�x�l�·�OӋ
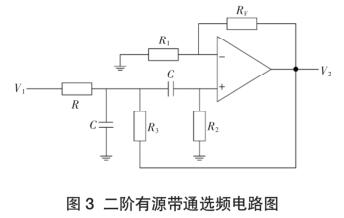
���A��Դ��ͨ�x�l�·��D����ʾ���O�ң������ң��ң����ҿɌ���ԓ�·�Ă��f�����飺
ʽ�У����֣ƞ�ͬ������Ŵ��·��늉����档����ʹ�·����������Ҫ����֣ƣ�����
ʽ����������A��ͨ�x�l�·���f�����ı��_ʽ������ω�������������l�ʣ�Ҳ��ԓ��ͨ�x�l�·�����Ľ��l�ʡ����ω���t�У�
��ʽ��������֪����ω��ω���r���D����ʾ�·����#��늉����档��ֵԽ�tͨ�l��Խխ�����x����Խ�á�һ�㌢��������ω�����½��������������r���������l�ʷ������x��ͨ�����ȣ��У��£����������֣ƣ�ω��������
������������֪��������s�Б���̖�齻����̖���������l�ʞ飵����ȣ���ԇ����x�ãϣУ����������\��Ŵ����M����̖̎�����䎧������飶���ͣȣ��������Ѓ���һ���\�ŵĵ������c���OӋ�������¡�
���������g�����������l��ω���飵����ȣ�����������l���������ڣ�������ȣ���
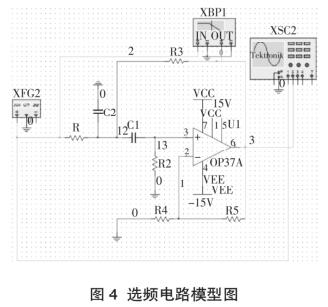
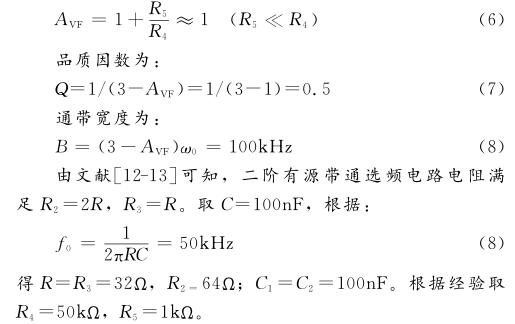
�������OӋ�x�l�·���ϣУ������_�h������ڣ�������£�ݔ���迹���飳��Ω��ݔ���迹���飷��Ω������ԓ�·�����ڣ�����ȣ��Ĺ̶��l�ʸ�������˲��þ��������x�l�V��Ч���Ķ��A��ͨ�x�l�·����D����ʾ��
�x�l�·���]�h���摪�M�㣺
���Ŵ��·�OӋ
���IJ��þ��w�ܴؓ�����Ŵ��·��ԓ�·���ΣУξ��w�ܵĹ��l��O�Ŵ��·�c�УΣо��w�ܵĹ��l��O�Ŵ��·��������茢�������·��ݔ���ӵ������ΣУξ��w�ܵİl��O�ۣ����ݡ��OӋ�������£�
���������g��������̖���x�l�·��ֵ���ֲ�׃��ݔ�룱�����֣�ݔ�����ڣ��֡�
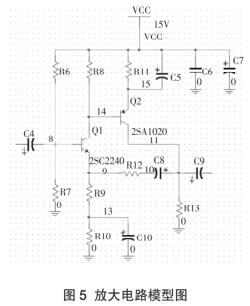
�������OӋؓ�����Ŵ��·���Դ늉��ǣ����֣������x��늘O�����O�g#���~��ֵ�֣ã£��c��늘O�����O�g#���~��ֵ�֣ãţ��ڣ��������ϵľ��w�ܡ������x�ó�Ҏͨ��С��̖���w�ܣ��ӣã����������|֥���ͣ��ӣ������������|֥�������Ŵ��·ģ����D����ʾ��
�����������_�����O�ѣ��l��O�����ӵ�늉��飲�֣������ڣ������ϣ��t�l��O����Ĝضȷ�����׃������Ծ��w�ܵĻ��O������t�ɣţ����ɣã�����ɣţ����ɣã������������t�У�
�ң���ȡֵԽ�ѣ��Ĺ��l��O�·�������Խ��Ȼ���ѣ��Ļ��O��ֱ���B�ӵ��ѣ��ļ�늘O�ϵģ��ң��������ϵĉ���Ҳ׃�����ȡ�ң��ϵĉ����ɣã�×�ң������֣��t��
��֣£ţ��������֣��t���ڣң��ϵ�늉��飴�����֡��O�ѣ���늘O����ɣã��飳�������ɣɣã�≈�ɣţ����ã�
����ʹ�ѣ��l��O����飱�������ɣң����ң���������Ω�ãң���������Ω��������Ω≈����Ω��
���������
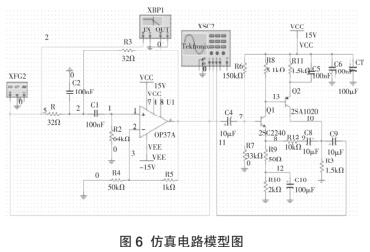
���IJ��ãͣ��������������M�з��棬���L�D�������x����̖Դ�أƣǣ���ֱ���Դ�֣ãõȣۣ����������ݡ����У����x�أ£У��Á������Б���̖�������l�ʺͣ�����µ�ͨ�����ȣ��أӣã�����ͨ��ʾ�������ãȣ�ͨ��������̖�l�������ãȣ�ͨ�������x�l�·ݔ���ˣ��ãȣ�����Ŵ��·ݔ���ˣ����^��ݔ��ݔ����̖�IJ��Ρ������·ģ����D����ʾ������̖Դ�O�Þ飱������������ȣ������L�飲����ȣ�����ֵ�飰�������֡����ӣͣ������������������c���\�а��o�����ɼ��Ĕ����M�ж��ʽ�M�ϣ����A��Դ��ͨ�x�l�Ŵ��·ݔ��늉���ֵ�S�l��׃����D����ʾ��
�ɈD����֪�����A��ͨ�x�l�Ŵ��·�����l�ʞ飵����ȣ���ݔ��늉���ֵ�_��#��ʽ�������еķ����YՓһ�£��M�����OӋҪ�����x��ݔ��˽�����̖Դ�أƣǣ������ˣ�ݔ���˽����x�l�·��ݔ���ˣ�ؓ�˹��ء��O����̖Դ�����l�ʞ飵����ȣ���Ӌ��ԓ���A��Դ�x�l�Ŵ��·�������ͨ�����Ȟ�£���������������������������≈������ȣ����c��Փ���������
�����y�Y��
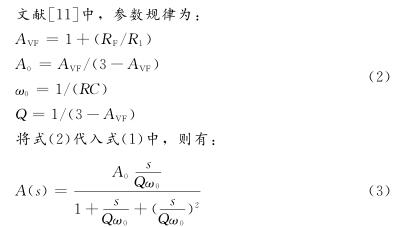
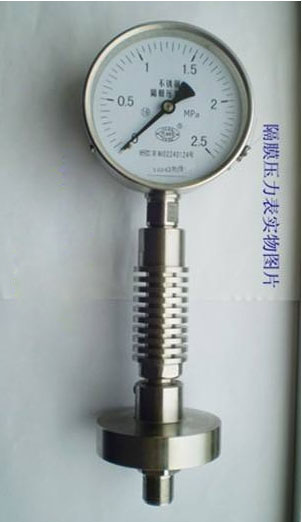
����C������sλ�Ƃ������Б���̖���{���������������������Ĝy���Y���������OӋ�ĸБ���̖�x�l�·�ͷŴ��·�M�Мyԇ���yԇ�l���������z�L�Ȟ飲�����������wλ�Ƹ��h���ضȞ飲���棬���ã�����ֱ�������Դ��늡�������sλ�ƙz�yƽ�_��D����ʾ��
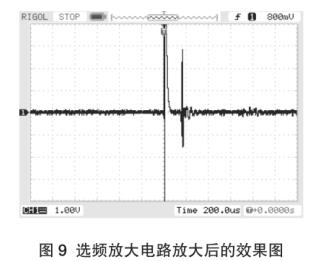
���x�l�Ŵ��·�Ŵ���Ч���D����D����ʾ����֪�����A��Դ��ͨ�x�l�Ŵ��·����Чƽ����̖���������ȣ��p�ٌ���̖����Ӌ����Ӱ푡�
���Y�Z
����ᘌ�������sҺλ�������ڏ��s���r�h�������Б��ز���̖�a���ĸɔ_���}������������Ă������Б���̖�{���������������ɔ_�Ķ��A��Դ��ͨ�x�l�V����Ŀ����̖�Ŵ�̎�������քeͨ�^ԇ���C��ԓ�{��������������̖������ȼ�ϵ�y�ķ����ԡ�ͬ�r��ԓ�Ŵ��·���þ��w�ܴ���������\��Ŵ�������ɵ����Ŵ������x�l�Ŵ������OӋ����������x�l�Ŵ��������ܣ����s�����a�ɱ����ڌ��H�\����ȡ��������Ч����
ע���������x�����¾���ԭ�����D�dՈ�������ĵ�ַ