
ժ��Ҫ:��ڏ����w��������Ӌ�V�������ڟ����ŷűO�y���I���Ƶ��I����������Ӌ�Ă����r�g�y���ʴ_��У���Ƿnj���У�ʵ���Ҫ�h����ͨ�^������������Ӌ�r�g�y���ʴ_��У���b�ã����F����ڏ����w������Ӌ�����r�g�ķnj���У�ʡ�ԓ��shou�����3�N��ͬ�ij�����Ӌ�����r�gУ�ʷ�����������ͬ������Ӱ����أ����ͨ�^��׃̽�^�g���x������ͬ̽�^�g���r��������Ӌ�����r�g�Ĝy���`���M��У�ʡ�ԇ�Y����������������Ӌ�����r�g�Ĝy���`���S���x׃�������_�����ؘ��ٌ���������Ӌ�����r�g�M�������ķ�������ʴ_���y���Y�����_���Ȟ�0.2%��
������
��������S��ȫ�����׃�������Қ��w�Ĝp��Խ��Խ�ܵ��Pע����Ч�ؿ��ƺ͜p�ٜ��Қ��w���ŷ��Ǯ�ǰ���ͬ�挦�ľ�����[1-2]�����о����ָ����ȫ��35%���ҵ�CO2�ŷ���Ҫ����������������ИI[3-5]��2017�꣬ȫ��̼�����Ј�ȫ���_����shou���{��������ИI[6]������һ��������I��ÿ�������̼�ŷ��������_���װ��f���������ŷ��������1%���͕��漰�װ��fԪ��̼�������~����ˣ�̼���Ĝʴ_Ӌ�����P��Ҫ��Ŀǰ������̼�����Ј���̼�ŷ������㷽��߀�ǻ���ȼ�϶�Ӌ�㣬����ʹ�ù��wȼ�ϵ���I�����ڹ��wȼ��Ʒ�|�IJ������ԣ������ȼ�϶˺���̼�ŷ����������_�����^�����Mһ�����̼�˲�Ĕ����ʴ_�ȣ��Ї�����ϕ����ڽM����C�����B�m�ŷűO�yϵ�y��CEMS������̼�˲鷽���Ŀ����ԡ�
����̼�ŷ����y����Ҫͬ�r�y�������еĶ�����̼��Ⱥ͟���������ͨ��������Ȝy�������^�ߵĜʴ_�ȣ�RSD�s��1%~5%���������������Ĝy���ʴ_������ƫ�ͣ�RSD�s��3%~50%�������ڟ����ڏ��^���Ҿ��иߜظߝ����ӏ��s�������ȸߵ����c����Ҏ�������y�ʴ_�y����������������Ӌ��һ�N�ǽ��|ʽ�ĸߜʴ_�Ȝy��������ͨ�^�y���ܵ��ȶ��l���ϵ�ƽ�����٣�ʹ�ø�˹�e��Ӌ��õ���������ʴ_�������܉���5%[7-8]��
���ښ��w�����˜��b�ÿڏ������ƣ���Ҏ���w�����˜��b�Ì��д�ڏ���������Ӌ���o���M��У�ʣ�����������Ӌ�Ĝy����������������ģ�ͣ��������ٵĜy��ͨ�^�΅����͕r�g�����y���@�ã���˿���ͨ�^���΅����͕r�g�����քe�M��У�ʁ팍�F�������ٵ�У��[9]��
��������Ӌ�r�g�y���`����Ҫ�����ڳ���̖��̽�^�Ȳ��Y���Ă����ӕr����|�L�ȡ�Ӳ���·�Լ��㷨��[10]��ÿ��̽�^�������������������ȫһ�£�����Ҳ�����������������Ӌ���a�S�Ҟ��˜p�ٳ������r�g�Ĝy���`�������̽�^ƥ��ӡ����o�ӵIJ��|�ͺ�ȣ��Լ����|�IJ��|���L��Ӌ���һ��ϵ�y�ӕr������������Ӌ��������ʹ�ýyһ������ֵ�M������[11]��Ȼ�����mȻ�@�N������ʽ���ԜpС������Ӌ��ƽ�������r�g�y���`��������ܴ_���侫���_������Ӌ����˜ʡ�������Ҫ���������r�g�Ĝy���ʴ_���M���о�������������Ӌ�r�g�y���ʴ_��У���b�ã�ͨ�^���^3�N���r�g�y���ʴ_��У�ʷ������õ�#��Ӌ�㳬�r�g�y���`��ķ�������Ӌ��ԓ�����Ĝy�����_����ˮƽ��
1������Ӌ�nj���У��
�ɳ�������Ӌ�ĕr��y��ԭ��[12-13]��֪�����ó�����̖�������������������r�g�IJ���܉�y�����������w��ƽ�����١�������Ӌ���ٶȜy��ģ������ʽ��ʾ��

ʽ�У�V——���w���S��ƽ�����٣�m/s��
L——���L�ȣ�m��
ϕ——���Ƕȣ���°����
t�——����̖��������r�g��s��
t��——����̖���������r�g��s��
��������Ӌ�������ٜy���ʴ_����Ҫȡ�Q�ڎ΅�����L��ϕ���͕r�g������t혡�t�棩�Ĝy���ʴ_�ȡ����ԣ��ڌ�������Ӌ�M�����ٶȷnj���У�ʕr����Ҫ������������r�gt혡����������r�gt���M��У�ʡ�
2������Ӌ�r�g�y���ʴ_��У�ʷ���
2.1�p���L�ȷ�������һ��
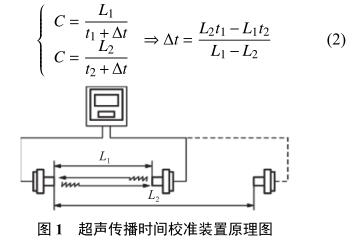
���O����^���У��b���п՚�ضȡ���≺���������ֺ㶨�������ٻ�������һ�£�����̖�������y���^���У��ڲ�ͬ�ľ��x�£��r�g�y���`��Δt��׃����D1��ʾ��ͨ�^��que�y���ɂ���ͬ̽�^�g�ľ��xL1��L2������t1��̽�^�g���x��L1�r����Ӌ�y�ó���̖�����r�g����t1+Δt�鳬���ڃ�̽�^�g�����Č��H�r�g���þ��xL1���Դ˕r�g���ɵó����ٴ�С����׃̽�^�g���x��L2��ͬ�ӿ��Եõ�����Ĺ�ʽ�����܉�Ӌ��ó��������r�g�y���`�� Δt �Ĵ�С��
2.2 �p���L�Ȝض��a��������������
�������y���^���У��՚�ضȿ��ܰl��׃���������ٰl��׃�������������ڜy���^���Мض�׃����������Ӱ푣����Ԍ�ʽ��2���M�����������O����̖�������y���^���Ђ����r�g�`�� Δt ��ͬ�������ڿ՚��Ђ���������՚��е��� [14] ��
ʽ�У�
C——�ضȞ� T �r�՚��е��٣�m/s��
C 0 ——0 �� �¿՚��е��٣�m/s��
T——�՚��еĜضȣ��档
�ضȜy�����ؘʲ��_���Ȟ� 0.005 �� ���K���ض�Ӌ��ʽ��2�����Mһ���Č���
2.3 �����L�ȷ�����������
��������^���п՚�ضȺʹ�≺������������guojia�˜��c���g�о�Ժ (NIST) �_�l��Ӌ�㹤�I��Ҫ���w��������ğ����W��ݔ�\���Ե�ܛ��REFPROP���܉�Ӌ��˜��٣���M���ٵIJ��_���Ȟ� 0.19%����̽�^�Ƅӵ�̽�^�g���x�� L �r��ʹ�þ��x���Ԙ˜��ټ��ɵõ������ڃ�̽�^�g�����Č��H�r�g��ͨ�^�ͳ�����Ӌ���H�y���Ă����r�g����Ӌ������r�g�y���`�� Δt������в��Üʴ_�ȵȼ��� 0.01 ���Ĕ���ʽ����Ӌ�y����≺�������ؘʲ��_���Ȟ� 0.005 �� ���K���ض�Ӌ�y���ضȡ�������Ӌ�����r�g�y���`��飺
ʽ�У�C——�ضȞ� T�������� P �r�՚��е��٣�m/s��
L——̽�^�g�ľ��x��m��
t——������ӋӋ�rϵ�y�y�õ�ƽ�������r�g��s��
Δt——����̖�����r�g�y���`�s��
��ԓ������Ӌ���C�е�Ӌ�rϵ�y�У��քeӛ��˃ɂ��r�g������̖��̽�^�� A �˂��� B �˵ĕr�g�� t A ����̽�^ B �˂��� A �˵ĕr�g�� t B ���������y���^���У������փȟo�՚����ӣ�����ȡ���ߵ�ƽ��ֵ t ���鳬̽�^ A �� B ֮�g��ƽ�������r�g��
�� Δt A ��ʾ̽�^�� A ���� B �˵Ă����r�g�Ĝy���`�Δt B ��ʾ�� B ���� A �˵Ă����r�g�Ĝy���`�Δt ��ʾ̽�^ A �� B ֮�g��ƽ�������r�g�Ĝy���`�
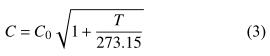
3 ���b��
���о������˴�ڏ����w������Ӌ�����r�gУ���b�ã����b���܉�����У�ʳ�ƽ�������r�g����D 2 ��ʾ�������b�÷֞� 3 �����֣����²�����̽�^�g���x�ľ�que���ƺ͜y�����ڶ������ǭh���ضȺʹ�≺���y��������Ӌ��˜��٣����������dz�����Ӌ�����r�g�����ɼ���̽�^�g���x�Ĝy���ʴ_���������OӋ�е��P�I���֣��b������API�������x�y��̽�^֮�g�ľ��x���x���IJ��_���Ȟ� U=0.14 µm+1×10 −7 L(k=2)��
shou��ͨ�^�A�b�C������̽�^�̶����A�b�C���c���K���B�����K�ϰ��b�˹̶��C�����܌�̽�^���w�̶��ڌ�܉�ϡ����Ҷ˵ĊA�b�C�����O���˺���픾o�C�������ڼ������xֻ�ܜy�����w���ƄӾ��x�������ÿ�Ό��ǰ������̽�^������|����ʹ�ú���픾o���J��˕r̽�^�g���x���㡣Ȼ���Ҷ�̽�^�ƄӾ��x L 1 ��ӛ䛳�����Ӌ���C�е�Ӌ�rϵ�y�y���Ă����r�g t 1 ���ٌ�ǰ���Ƅӵ�̽�^���ƄӾ��x L 2 −L 1 ���˕r�ɳ�̽�^�g���� L 2 ����ӛ䛳�����Ӌ���C�е�Ӌ�rϵ�y�y���Ă����r�g t 2 ���ɴ˵õ��������r�g�Ĝy���`�� Δt�������b�÷������]�IJ����փȣ����C��y���h�������]�ԡ�
4 ����������̎��
4.1 �p���L�ȷ���������������һ��
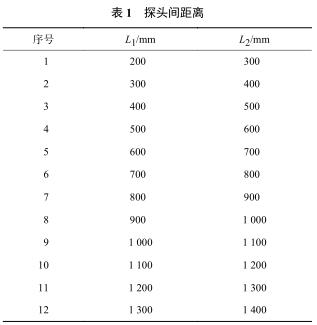
������x��y�� 13 �N��ͬ������Ӌ̽�^�g���x��ÿ�Ό��ʹ�ÃɷN�ӽ��L�ȵĽM�ϣ�L ��� 1��ʾ��
��������һӋ��õ��ij������r�g�y���`����D 3 ��ʾ��
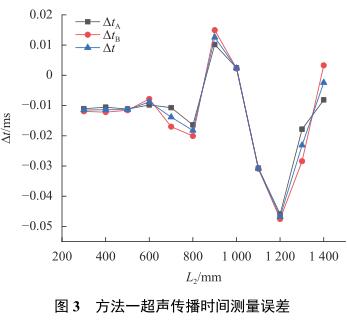
�ɈD��֪���ɂ�����Ă����r�g�y���`����ͬ̽�^�g���x�»����Ǻϡ���̽�^�g���x��׃�r���r�g�y���`�� Δt �l���^��׃��������̽�^�g���x�� 300~600 mm �r��Δt �^�鷀��������̽�^�g���x���� 800 mm �r��Δt ׃�� �^���ڲ�ͬ���x�y���� Δt ��ƽ��ֵ��−0.013 6 ms��
4.2 �p���L�Ȝض��a����������������������
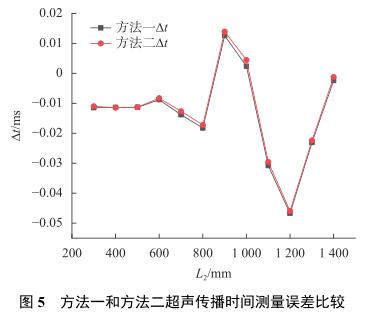
����������Ӌ��õ��ij������r�g�y���`����D 4 ��ʾ�����Կ������շ������õ��ĕr�g�y���`��Ĕ����ͷ���һ�^��һ�¡����ɷN�����ij������r�g�y���`����L����ͬһ�D���M�б��^����D 5��ʾ��
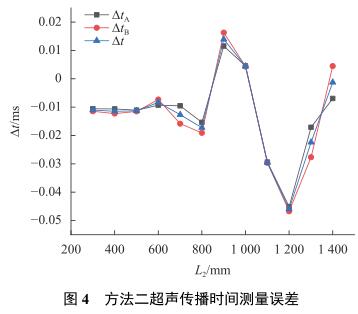
�mȻ�����������˜ض����������]���ض�׃�����ٵ�Ӱ푣����Y������, �ɷN����Ӌ��õ��ĕr�g�y���`�� Δt ����ͬ�ľ��x�»�����һ�µġ��f���ض�׃�����y���Y�� Δt ��Ӱ푲����⣬�ɗl������һ���Ա������ڲ�ͬ̽�^�g���x�µõ��ĕr�g�y���`��IJ�������ڜض�׃����ɵġ�
4.3 �����L�ȷ�����������
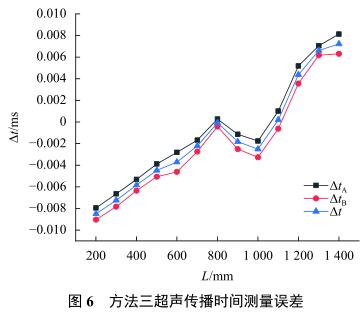
����������Ӌ��õ��ij������r�g�y���`����D 6 ��ʾ��
�������r�g�y���`���S�����x�����ӿ��w�������ӵģ���̽�^�g���x�� 800~1 000 mm �r��Δt �б��^С�ķ���׃�����ڲ�ͬ���x�y���� Δt ��ƽ��ֵ��−0.001 4 ms���cǰ�ɷN������ƽ��ֵ��һ�¡����Ƚӽ�̽�^�g���x�r�� Δt���䔵ֵ��׃���ġ����Δt ��׃���ģ����Է���һ�ͷ������ļ��O��������
�������������y�ضȺ͉����M�ϵõ��˜��٣�����У��M�ж��c�ضȉ����y����ȡƽ��ֵ���������g�ضȺ͉����������Ե�Ӱ푣�ʹ�� REFPROPܛ���@�ؘ��ٜʴ_�ȸߡ�
4.4 �r�g�y�����_���ȷ���
�������� 3 �N�������r�gУ�ʷ����Мʴ_��#�ߵģ���y�����_���ȿ��Ը�����ʽӋ��õ���
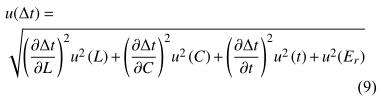
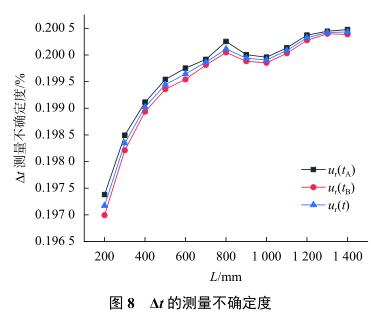
��������Ӌ��ÿ������������ϵ���͜y�����_���ȣ���̽�^�g�� 1 000 mm ���������Y����� 2��ʾ�����Կ������ٵIJ��_������ Δt ���_���ȵ�#��Ҫ��Դ���ڶ����Դ��ϵ�y�y���؏��ԡ�
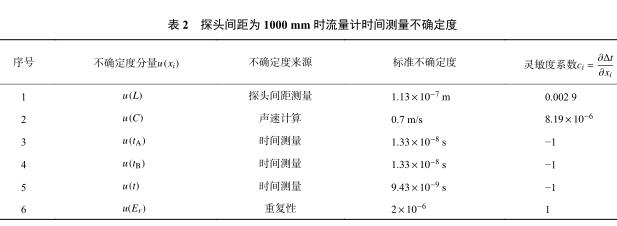
����^���У�ʹ��У���^�ķ��磨FARO����yʽ���S���˜y���ی�̽�^�g�ľ��x�M�Џ͜y����D 7 ��ʾ�����c�������x�y���õ��Ĕ����M�б��^��#���`��� 0.2 mm���f���������x�y�����_���Ȕ�ֵ�ǿ��ŵġ�
�ٔM������IJ��_���ȿ��Ը��� REFPROPܛ���@�ã����ٔ������_���Ȟ� 0.19%�����⣬�ڜy���^�������ڭh���ضȺ͉�����׃����Ҳ�������ٜy�����_���ȣ���˱��о������y�����������ٵ�#��ֵ��#Сֵ�����վ���ֲ����]��Ӌ��õ����ڜضȺ͉���׃����ɵĘ˜��ٜy�����_���ȡ�������Ӌ�y���r�g�IJ��_���Ȟ�r�g�y��ƽ��ֵ�������˜�ƫ��ڲ�ͬ���g���µIJ��_���ȷֲ���D 8 ��ʾ���S��̽�^�g������ӣ�Δt �IJ��_�������w��u���ӣ���̽�^�g����� 800 mm�r Δt �y�����_����������u�ž��������y���Y���������ɷ������y�� Δt �������ϳɘ˜ʲ��_���Ȟ� 0.2%��
5 �Y���Z
���Ľ����˟��ⳬ����Ӌ�r�g�y���ʴ_��У���b�ã���Ҫ���ڴ�ڏ�������Ӌ����̖�����r�g��У�ʡ�ͨ�^���^���N���r�g�y���`��∆t �y���������l�F��ڏ����w������Ӌ�����r�g�Ĝy���`�����S���x׃���������ɷ���һ�ͷ������� Δt �ڲ�ͬ�ɂ�̽�^�g���x�y���r�Dz�׃�ļ��O���������@�ɷN�����Ĝy���Y�������š���������ʹ�� REFPROP ܛ�����������ضȺ͉����M�ϵõ��˜��٣��Ķ�Ӌ��r�g�y���`����u������Δt �����ϳɘ˜ʲ��_���Ȟ� 0.2%��














 �Pע�҂� ���F���A
�Pע�҂� ���F���A